
Surgical robotics is one of the domains where the transformation driven by artificial intelligence and autonomous systems becomes most visible. Unlike industrial manufacturing, the focus here is not primarily efficiency, but millimeter-accurate interventions on the human body, where tolerances for error are minimal. This article explains how surgical robotics works from a technical perspective, why it emerged, which structural changes it is triggering within healthcare systems, and which strategic implications can also be derived for companies outside the medical sector. Decision-makers seeking to understand how highly regulated, safety-critical environments can be transformed through intelligent systems will find a realistic and practice-oriented reference model here.
Before we dive deeper into the topic, it is useful to structure the core terminology. Surgical Robotics: Refers to robot-assisted systems that support a surgeon during minimally invasive or open procedures by stabilizing, scaling, or filtering movements. Telemanipulation: A control principle in which the surgeon’s hand movements are transferred in real time into precise instrument movements, often including motion reduction and tremor filtering. Minimally Invasive Surgery: Surgical procedures performed through small access points, where instruments are introduced via incisions of only a few millimeters in order to reduce tissue trauma. CT (Computed Tomography) and MRI (Magnetic Resonance Imaging) are advanced medical imaging technologies used to create detailed internal images of the human body. Computer-Assisted Imaging: The integration of intraoperative imaging data such as 3D video or CT scans into the robotic system to enhance orientation and decision quality. Haptic Feedback: Force and resistance feedback that helps the surgeon better assess tissue interaction. Regulatory Approval: Formal authorization by authorities ensuring that a system meets defined safety, quality, and effectiveness requirements. Together, these concepts form the foundation on which modern robot-assisted surgical systems are built.
Surgical robotics historically emerged from two bottlenecks: the physiological limitations of human fine motor control and the increasing complexity of modern procedures. Even highly skilled surgeons are subject to physiological tremor in the submillimeter range. In open surgery this was often tolerable, but in minimally invasive procedures it is not. Robotic systems therefore introduce motion scaling, where, for example, a hand movement of one centimeter is translated into an instrument movement of one millimeter. At the same time, high-frequency tremor is algorithmically filtered. This creates a new level of precision that is no longer based solely on individual dexterity but is stabilized at a systemic level.
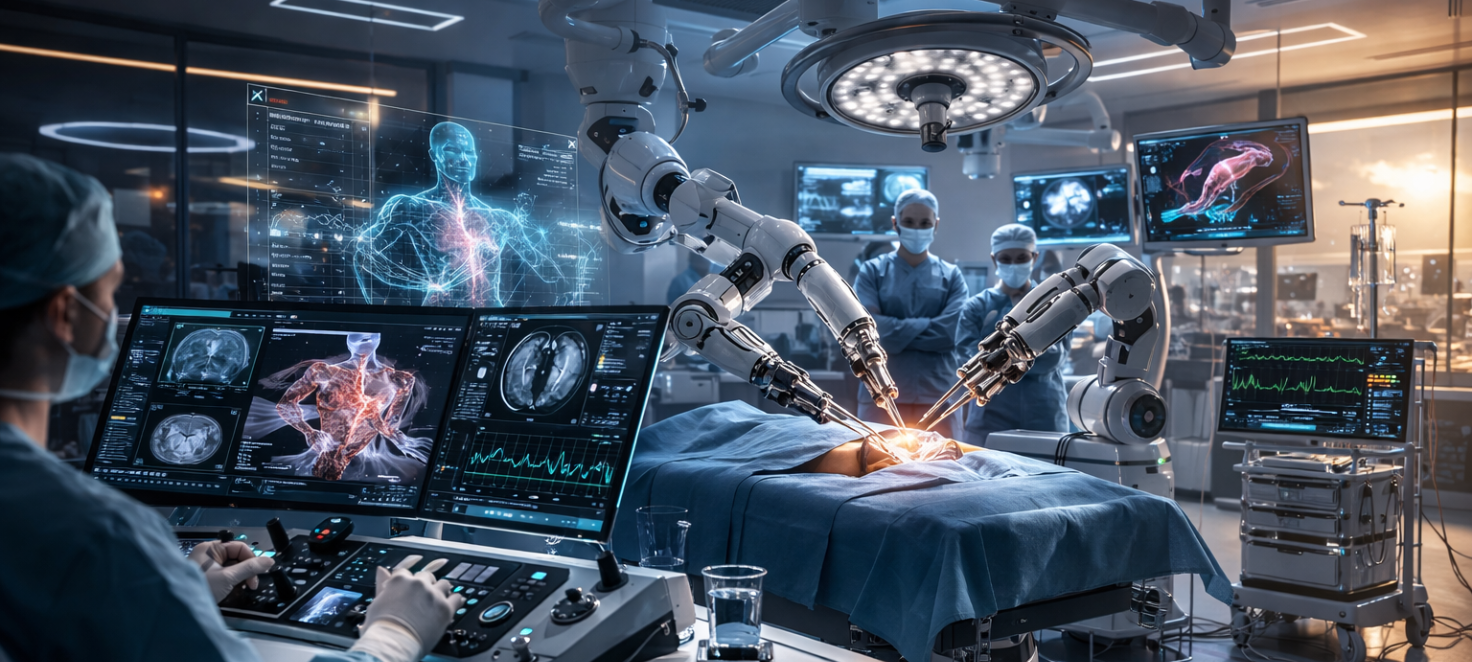
From a technical standpoint, surgical robotic systems are highly integrated platforms combining mechanics, sensor technology, image processing, and software control. Multiple axes with high rigidity and repeatability are driven through closed control loops. Imaging is typically provided via stereoscopic cameras offering the surgeon an enlarged three-dimensional field of view. Increasingly, these visual data streams are combined with intraoperative navigation systems based on preoperative CT or MRI datasets. The focus therefore shifts from purely mechanical support toward data-driven decision assistance.
With the integration of artificial intelligence, new levels of automation are emerging. Image segmentation algorithms can highlight tissue structures in real time, identify bleeding sources, or emphasize anatomical boundaries. In the future, partially automated sub-steps may become feasible, such as standardized suturing or the exact placement of implants. However, it is crucial to recognize that these systems operate in safety-critical environments. Unlike in industry, a system failure is not merely a production interruption but potentially life-threatening. This leads to strict requirements regarding redundancy, validation, cybersecurity, and traceable decision logic.
A frequently underestimated aspect is the digital attack surface. Modern surgical systems are networked, receive software updates, and are integrated into hospital infrastructures. Think of a surgical robot as a cyber-physical system: a tightly integrated combination of mechanical arms, real-time control software, imaging systems and network connectivity. The robot does not act independently. Its movements are generated by software that processes sensor data, imaging inputs such as CT or MRI scans, and the surgeon’s commands. In modern hospitals, these systems are connected to broader IT infrastructures for updates, maintenance, data exchange and sometimes remote diagnostics. Each of these connections improves functionality, but it also increases the digital attack surface. The attack surface includes all interfaces through which an unauthorised party could potentially access or manipulate the system. In a normal IT environment, a breach may result in stolen data or service disruption. In surgical robotics, however, digital commands are translated directly into physical motion. If control signals were altered, the robot’s instruments could move differently than intended inside the patient.
This is why standard IT security alone is not sufficient. Two dimensions must be addressed simultaneously. Information security protects the integrity and authenticity of data through measures such as encryption, authentication and network segmentation. Functional safety ensures that the system remains safe even if errors occur, for example by enforcing strict motion limits, using redundant sensors and automatically stopping when anomalies are detected. The key insight is that in surgical robotics, digital security and physical safety are inseparable. A vulnerability in the software layer can directly affect mechanical behaviour. Securing such systems therefore requires an integrated approach that combines cybersecurity, control engineering and rigorous safety design. Trust is built not through technological sophistication alone, but through disciplined system architecture and governance.
Strategically, surgical robotics illustrates how trust in autonomous systems is built. Trust here does not arise from marketing claims but from measurable precision, documented error reduction, and regulatory transparency. Companies planning to introduce agentic or autonomous systems in other industries can learn from this domain that scaling becomes viable only when technical robustness, governance, and traceable processes interact consistently.

The global surgical robotics market reached US$11.98 billion in 2024 and increased to US$13.69 billion in 2025. It is projected to grow at a 14.7% CAGR through 2030, reaching approximately US$27.14 billion. Growth is primarily driven by rising demand for minimally invasive procedures, which reduce postoperative pain, shorten hospital stays, accelerate recovery, and lower complication risks. An ageing population and the increasing prevalence of chronic diseases further expand the need for high-precision surgical interventions.

A major European university hospital introduced a robot-assisted system for prostatectomies after analyzing postoperative complication rates over several years. The key challenge was precision in preserving nerve structures. By combining 3D visualization, motion scaling, and tremor filtering, the accuracy of tissue preparation was significantly improved. At the same time, a structured training program was implemented, as system mastery required new motor and cognitive competencies.
References:

In a specialized center for hepatobiliary surgery, an AI module was integrated that analyzes intraoperative video feeds and marks vascular structures in real time. The objective was to reduce intraoperative bleeding and define resection margins more clearly. Initially, the system was operated in shadow mode, where the visual markers were displayed but not used for decision-making. Only after several months of validation and comparison with postoperative imaging data was it actively integrated into decision support. This gradual approach reduced risks and established internal trust.
References:

A North American hospital network identified a security vulnerability in a connected robotic assistance system in 2025. The weakness affected an outdated communication library accessible through a maintenance interface. Although no surgical procedure was compromised, the incident led to immediate system shutdown and comprehensive audits. Subsequently, network segmentation, zero-trust architecture, and cryptographically signed software updates were made mandatory. The case demonstrated that functional safety alone is insufficient without a rigorous cybersecurity architecture.
References:
In the next article of this series, the focus will shift to functional safety and human-robot collaboration, particularly how standards and norms must evolve as autonomy increases. Feedback, suggestions, or practical questions from your environment will be addressed in one of the upcoming articles.